Robots are performing complex tasks now which would have been considered not possible a few years back. Robots need a mixture of hardware and software skills that appeal to me as an electronics engineer similar to the embedded systems field. So when the time came for me to decide on a topic for my master’s thesis, I was euphoric when me and my advisor Dr.Heni Ben Amor decided on building a basketball playing robot.
Single armed robots have seen a lot of research in the past and the present. Dual-armed robots like Baxter are currently used in a lot of research. Our lab already had a Baxter, but the task at hand needed a machine capable of delivering more agility than you can get from a Baxter. Robots are expensive, and I had to choose the components such that any student in the future could also utilize it for his research experiments.
Dynamixel servos from Robotis are one of the standard servos used in the research field. Dynamixel Pro servos provide better precision than their older counterpart. We decided on using the Manipulator-H arms that use Dynamixel Pro servos as their engine. These servos have an accuracy of ~0.0007 degrees and rotate at a speed of 180 degrees/second. The arms are capable of lifting a load of 5 kg.
Pasta Robot Demo at AAAI-2016
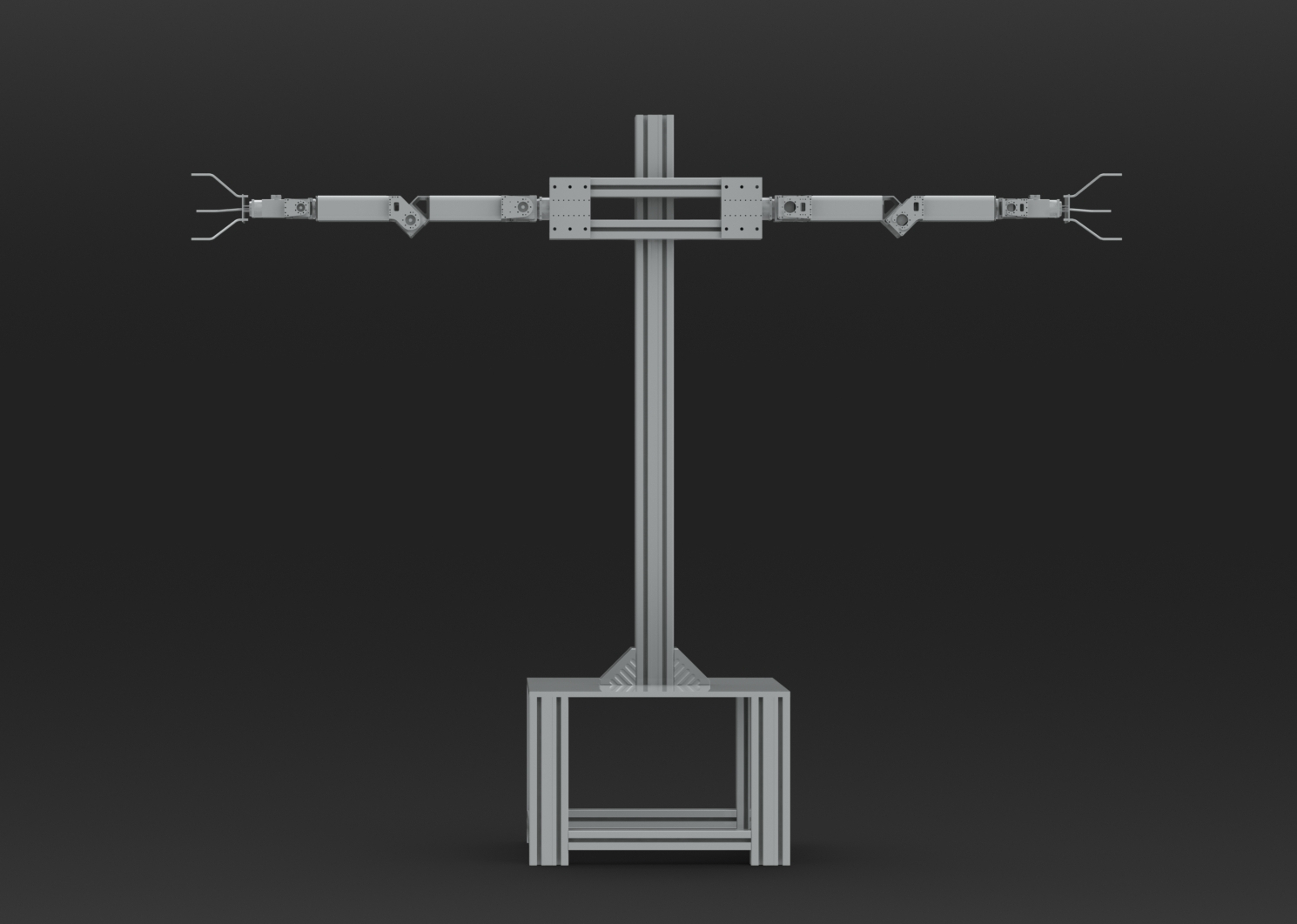
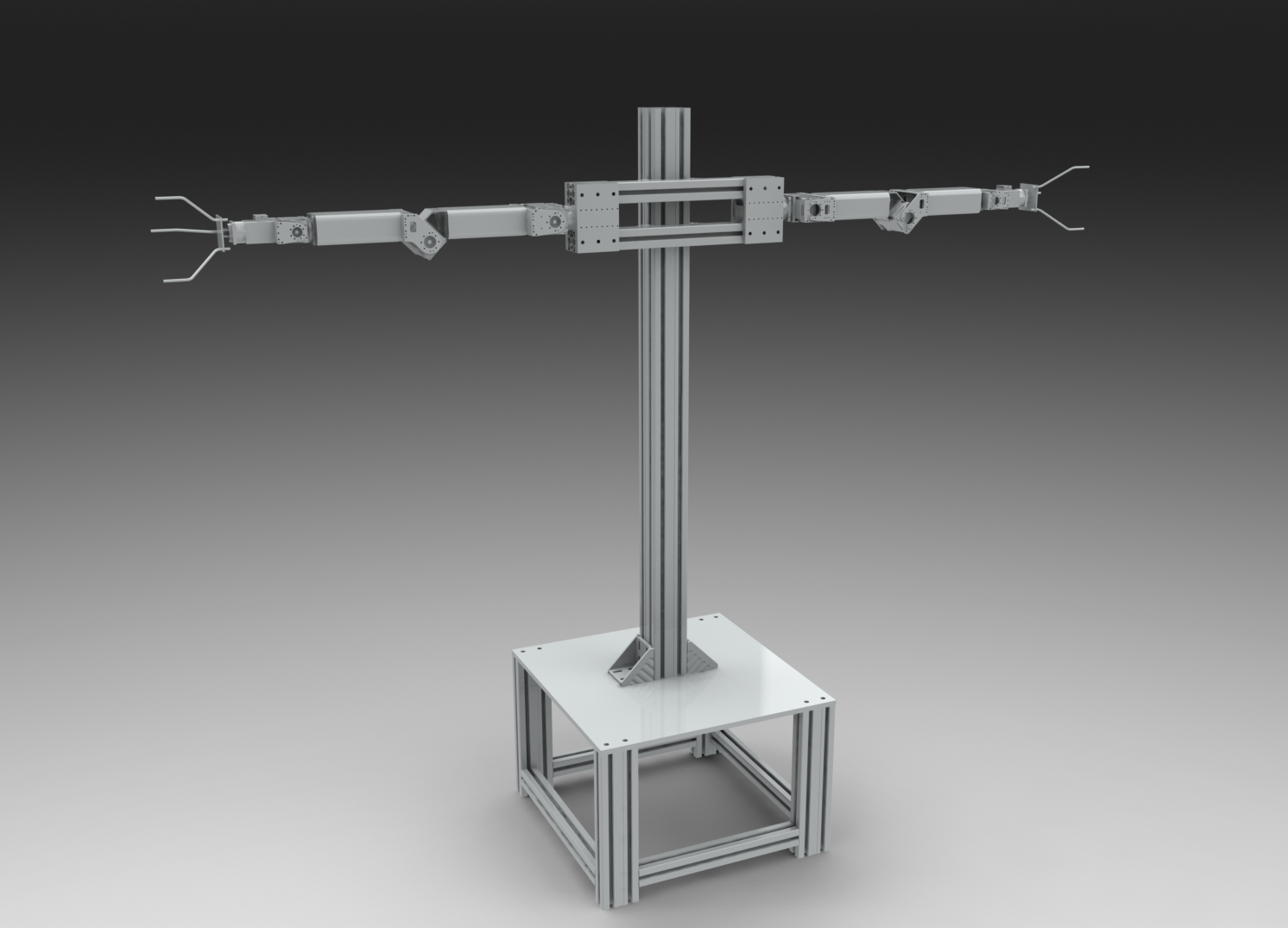
I made use of Bosch Aluminium Profiles to design the stand that could stably support the arms and not tip over during the high speed throwing motion. I also added a big red emergency stop button to keep my professor happy. The rendered images of the model are below.